Alternatively, these websites may already contain answers to the topic :
T
Tuning
Tuning is a particular method of dynamically optimizing the scan system. Here, fine adjustments are applied to the analog or digital servos that determine the scan system's dynamic response to deviations from the set position.
Most tunings are characterized by tracking error and maximum speed. A small tracking error enables fragmented/fine-structured marking, but sharply limits maximum speed. In contrast, higher speeds also increase tracking error.
A special case is jump tuning, whereby the jump time for long distances is minimized. But this causes tracking error to become inconstant.
On analog systems, tuning is directly implemented in the servo electronics. Systems with iDRIVE technology (e.g. intelliSCAN) can internally store up to three tunings. During marking, you can switch between those tunings.
What kind of tunings are available?
Tunings can optimize scan systems to meet diverse requirements, e.g. for vectors, jumps, corner-precision or micro-machining.
The following table provides an overview of the most common tunings:
| Tuning | optimized for | Application |
|---|---|---|
| (Fast) Vector Tuning | Well-balanced, optimal relationship between all parameters for a wide range of applications | Vector marking |
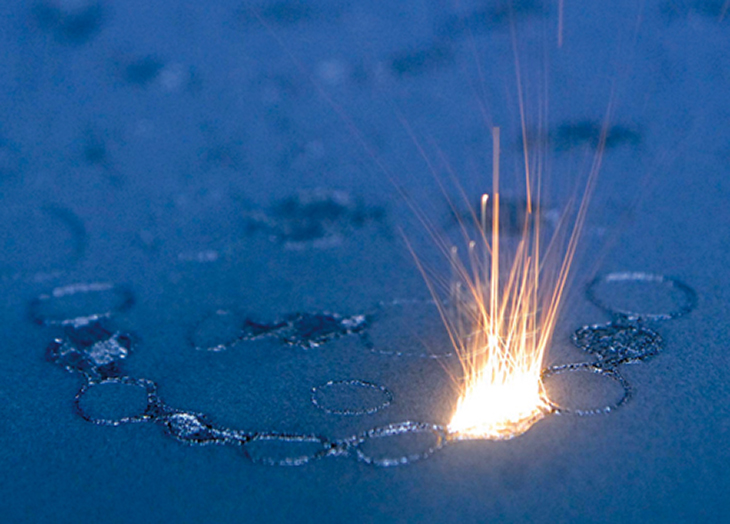
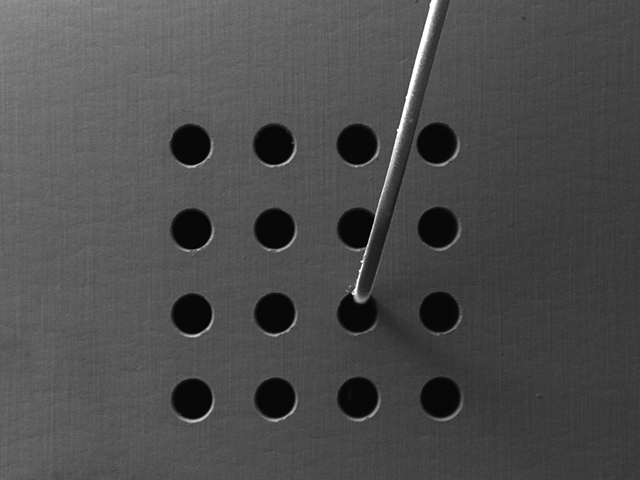
| Jump-Tuning | Minimal jump times for long jumps | Drilling |
| Sharp Edge Tuning | Low acceleration times, small corner-rounding |
Micro-structuring |
| Micromachining Tuning | Low dither, low line-ripple | Vector marking, Micro-structuring |
| Line Scan Tuning | Highest line speeds (with higher acceleration time) | USP laser processes |
Lasers as Tools
By transforming lasers into universal tools, scanning solutions help to add functionality and value to materials. SCANLAB's broad palette of scanning solutions fulfills demands for higher speed, more precision, greater efficiency or improved environmental compatibility.